ML-R Motor Driver 2x125A (mrm-mot2x125)
Ukratko
Pločica za pogon 2 motora s četkicama. Elektronika podnosi 125 A kontinuirane struje, ali štampana ploča ne.
Bitnije razlike između ovog kontrolera i ML-R Motor Driver 1x125A (mrm-mot1x125):
- Prvi je za 2 motora, drugi za 1.
- Prvi se kofigurira SPIjem, vrlo fleksibilno, ali uz komplikaciju potrošnje dodatnih pinova mikrokontrolera.
- Drugom se može konfigurirati samo limit struje, putem zalemljenih otpornika. Promjena parametra zahtijeva SMD lemljenje.
- Prvi se upravlja putem 2 PWM ulaza (veće mogućnosti, ali troši 2 PWM pina), drugi putem jednog PWM i jednog digitalnog za smjer (manje mogućnosti, ali samo 1 PWM pin).
- Prvi ima veći minimalni napon struje motora (8 V), što praktički isključuje LiPo baterije s 2 ćelije.
Ovaj je kontroler pogodan za veće motore. Koristite li manje, npr. veliku većinu N20 i 20D (2 cm promjera), bolje ćete proći s kontrolerima ML-R Motor Driver 4x3.6A (mrm-mot4x3.6), ML-R Motor Driver 4x3.6A B (mrm-mot4x3.6b) ili MRMS Motor Driver 4x3.6A CAN Bus (mrm-mot4x3.6can) jer su jeftiniji i manji.
Cijena:
27,78 €, PDV uklj
Kupi
Osobine
|
Za vrstu motora.
|
S četkicama. |
|
Broj motora
|
2. |
|
Ulazni napon.
|
8 - 52 V. |
|
Logički napon.
|
Logička jedinica je već na 1.5 V tako da PWM ulazi rade na mikrokontrolerima s naponima npr. 1.8, 2.5, 3.3 i 5 V. |
|
Kontinuirana izlazna struja.
|
125 A. Elektronika je prilagođena konstatnoj struji od 125 A po svakom od 2 kanala. Na 50 V bi to bilo ukupno 40 kW! Međutim, pločica NEĆE podnijeti ni u kom slučaju takvo opterećenje. Premala je, s pretankim slojem vodiča. |
|
Vršna izlazna struja.
|
400 A po kanalu. |
|
Sučelje.
|
Svaki od 2 motora ima 2 PWM ulaza za kontrolu brzine i smjera rotacije (H-most). SPI konfiguracija raznih parametara kontrolera. |
|
Energetska efikasnost.
|
U stanju hibernacije troši vrlo malu struju (65 μA). |
|
Zaštita od obrnutog ulaznog napona.
|
Ne. |
|
Zaštita od podnapona (UVLO).
|
Da. |
|
Zaštita od prevelike struje (OCP).
|
Da. |
|
Zaštita od pregrijavanja (TSD).
|
Da. |
|
Ostale zaštite
|
Zaštita od greške kontrole (PDF). Pin za dojavu greške. Puna dijagnostika kroz SPI. |
|
Mjerenje izlazne struje.
|
Da, putem eksternih otpornika. |
|
Vanjski tranzistori.
|
Da. Zašto je ovaj kontroler tako skup? Manji kontroleri motora su obično integrirani u čip. Za jače struje taj dizajn više nije optimalan i obično se koriste vanjske komponente, posebno bar 4 snažna (skupa) tranzistora za H most. Tako je i ovdje: koriste se odlični tranzistori od 125/400 A, koji i koštaju. |
|
Mogućnost dogradnje firmwarea.
|
Nema mikrokontroler. |
|
RDS(ON) (drain-source on resistance)
|
1.8 mΩ. |
|
Čip
|
TI DRM8704. |
|
Mjerenja napona motora
|
Ne. |
|
Ulazi za enkodere
|
Ne. |
|
Izlazni kondenzatori za motore.
|
970 μF. |
|
Status LED.
|
LED za dojavu greške. |
|
Stardardizirani format.
|
Da. Više detalja ovdje. |
|
Plug and play.
|
Da. Više detalja ovdje. |
|
Konektor motora
|
2 x Molex KK396. |
Potrebni elementi
Spajanje
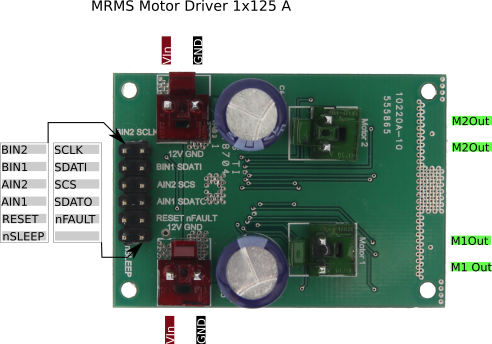
Nužno je spojiti nSLEEP i za svaki kontroler PWM ulaze: AIN1 i AIN2, odnosno BIN1 i BIN2.
- nSLEEP - ulaz, potrebno je dovesti logički napon 1 (npr. 3.3 V) da bi se kontroler podigao iz stanja spavanja.
- RESET - ulaz, pozitivni impuls resetira kontroler, npr. kad je u stanju greške.
- AIN1 - PWM 1 ulaz motora 1.AIN1 - PWM 1 input of motor 1.
- AIN2 - PWM 2 ulaz motora 1.
- BIN2 - PWM 1 ulaz motora 2.
- BIN2 - PWM 2 ulaz motora 2.
- nFAULT - izlaz - ako je logički 0, kontroler je u stanju greške. Detalje čitajte SPIjem.
- SDATO - MISO SPIja.
- SCS - MISO select.
- SDATI - MOSI SPIja.
- SCLK - takt SPIja.
Connectors
To connect MRMS motors, use ML-R 16D Motor Connector (mrm-16d2) or ML-R 25D Motor Connector (mrm-25d), soldered to motors. In this was it is possible to use standard cables, like ML-R Cable KK396-KK254 20 cm (mrm-kk3.96-2.54-20) and ML-R Cable KK396-KK396 20 cm (mrm-kk3.96-3.96-20), to avoid breaking of soldered connection on motor in critical moments.
If you connect Pololu 20D motors, use ML-R 20D Motor Connector (mrm-20d), for Pololu 25D motors ML-R 25D Motor Connector (mrm-25d), for N20 use ML-R N20 Motor Connector (mrm-n20). Other motors may fit into the adapters, but it is not for sure. Contact pattern may vary. Check the measures.
You can connect any other motor by making cables yourself. Motor end is motor-dependent. For controller end, use a kit, like Connector set 4xKK396 + 0xKK254 (mrm-con4-0), and You will get all the connectors for this board. Another possibility are semi-finished cables like ML-R Cable KK396 - bare (mrm-kk3.96-no-20) which have bare wires on motor end and matching connectors on controller side.